
�S����܇(ch��)�ռ��ʵ��������ӣ����M(f��i)���ڌ���܇(ch��)���齻ͨ�\(y��n)ݔ���ߵ�ͬ�r(sh��)����(du��)��܇(ch��)�������˸����Ҫ�������nj�(du��)��ȫ������˸��ߵ�Ҫ��(du��)�ںܶ�˾�C(j��)���������ց�(l��i)�f(shu��)����܇(ch��)�o(w��)���Ǽ��dz��^ʹ���£���܇(ch��)?y��n)��_(d��)���ÿ��Ԏ�˾�C(j��)��Q�@��(g��)�y�}�����Խ��(l��i)Խ����̼ҿ����@��(g��)�Ј�(ch��ng)��
��Ŀǰ�Ј�(ch��ng)��r������(gu��)��(n��i)��܇(ch��)?y��n)��_(d��)���a(ch��n)�S�Ҷ���ʹ�Æ�Ƭ�C(j��)���Ʒ�����ȱ����оƬ������������Æ�оƬ��(sh��)�F(xi��n)����(g��)ϵ�y(t��ng)���ܣ���(du��)��܇(ch��)?y��n)��_(d��)���a(ch��n)�́�(l��i)�f(shu��)�����H�ܽ����_(k��i)�l(f��)�����a(ch��n)�ɱ�����(du��)���C(j��)�Ŀɿ���Ҳ��(hu��)�кܴ���ߡ�Ŀǰ�ɶ���(gu��)�v�������˾�Ƴ���һ�܇(ch��)?y��n)��_(d��)����оƬ����GM3101���c���y(t��ng)������ȣ�������̖(h��o)̎���·�͆�Ƭ�C(j��)ܛ���O(sh��)Ӌ(j��)��������оƬ��(n��i)���Ñ���o(w��)���{(di��o)ԇ�Ϳ����Ƴ����C(j��)���������s�����Ñ����_(k��i)�l(f��)���ں������ɱ���Ҳ�����˵�܇(ch��)?y��n)��_(d��)�ļ��g(sh��)�T(m��n)����
����оƬGM3101�Ĺ�������
������܇(ch��)?y��n)��_(d��)����оƬGM3101����Ҫ���܅���(sh��)�飺�����ضȞ�-40��~+85�棻�Դ늉���5V���z�y(c��)������0.3~3.95�ף��z�y(c��)���Ȟ�0.05�ף���(b��o)��ݔ�����ڞ�150.4ms��4��(g��)̽�^݆���ɘ�һ��ݔ��һ�Έ�(b��o)����(sh��)��(j��)���������p����ַ�ʽݔ����(b��o)����̖(h��o)����(b��o)����̖(h��o)��������̽�^�z�y(c��)�����ϵK����xΣ�U(xi��n)�ȼ�(j��)��̖(h��o)������ϵK�﷽λ��̖(h��o)������ϵK����x��̖(h��o)��������Ϣ���c���y(t��ng)�Ć�Ƭ�C(j��)��������^���䃞(y��u)��(sh��)߀���ڣ����������`��(b��o)̎������߈�(b��o)����̖(h��o)�Ĝ�(zh��n)�_�ԣ��h(hu��n)���m��(y��ng)���ܣ���߈�(b��o)�����ܵČ�(sh��)���ԣ������R(sh��)�e���ܣ����Ժ���С���w����ֹ�`��(b��o)����GM3101�ă�(n��i)����D��D1��ʾ��
�����ĈD1���Կ�����ԓоƬ��������̖(h��o)̎�����ֺ͜y(c��)���\(y��n)�㲿�֡���(d��ng)оƬ��ͨ�Դ��̽�^�(q��)��(d��ng)���_����̽�^�l(f��)���(q��)��(d��ng)��̖(h��o)���(q��)��(d��ng)����̽�^�l(f��)��������̖(h��o)���(q��)��(d��ng)��̖(h��o)�l(f��)���ꮅ��оƬ�ȴ���̖(h��o)���ء�̽�^���յ�������̖(h��o)����̖(h��o)����оƬ���M(j��n)����̖(h��o)�ŴV����ģ��(sh��)�D(zhu��n)�Q̎����ӛ���̖(h��o)�l(f��)�ͺͽ��յĕr(sh��)�g�����(j��)�˕r(sh��)�g��Ӌ(j��)���ϵK����x����ݔ����(b��o)����̖(h��o)������̽�^�(q��)��(d��ng)���÷֕r(sh��)�����(q��)��(d��ng)��ʽ�������Ό�(du��)4��(g��)̽�^݆���M(j��n)���(q��)��(d��ng)��һ��(g��)̽�^�Ĺ������ڃ�(n��i)Ҫ�����l(f��)�ͺͽ��ՃɷN������4��(g��)̽�^�z�y(c��)��ɘ�(g��u)��һ��(g��)�z�y(c��)���ڡ���ǰһ̽�^�ڱ��������ڃ�(n��i)�](m��i)�н��յ����صij�����̖(h��o)���tоƬҲ�D(zhu��n)�������һ��(g��)̽�^�Ĺ�����
��������̎�����������
����1. �����̎��
������܇(ch��)?y��n)��_(d��)���O(sh��)Ӌ(j��)�^(gu��)���У������������һ��(g��)���^ʹ�Ć�(w��n)�}������Ŀǰ��܇(ch��)?y��n)��_(d��)���õ�̽�^���lj���մ�̽�^�����Ԯ�(d��ng)̽�^��(du��)��l(f��)��16��(g��)������ͬ�r(sh��)���������ķ���Ҳ��(hu��)�a(ch��n)��һ���������������̖(h��o)�����ɴ�С׃���������Ñ�ʹ�õ�̽�^��һ�£�����r(sh��)�gҲ����ͬ��һ���(l��i)�f(shu��)������r(sh��)�g��1.5ms~2ms������������F(xi��n)���ŵ��ϣ�����������r(sh��)�g��(n��i)���z�y(c��)������̖(h��o)����(hu��)�������͛](m��i)��������r(sh��)�g��(n��i)�͙z�y(c��)�������õ���̖(h��o)����(d��ng)ȻҲ�͟o(w��)���y(c��)������(y��ng)�ľ��x�������ڵ�܇(ch��)?y��n)��_(d��)�O(sh��)Ӌ(j��)�������һ��(g��)��ä�^(q��)���ĸ��Ҳ�����f(shu��)������̽�^����Ĵ��ڣ����������0.3m�ԃ�(n��i)��܇(ch��)?y��n)��_(d��)�ġ�ä�^(q��)����������O(sh��)Ӌ(j��)�в���������ϵ�y(t��ng)�͕�(hu��)������(d��ng)��������̖(h��o)��ݔ���e(cu��)�`�Ĉ�(b��o)����̖(h��o)��GM3101�����ׂ�(g��)���挦(du��)����̽�^�������M(j��n)������Ч��̎����
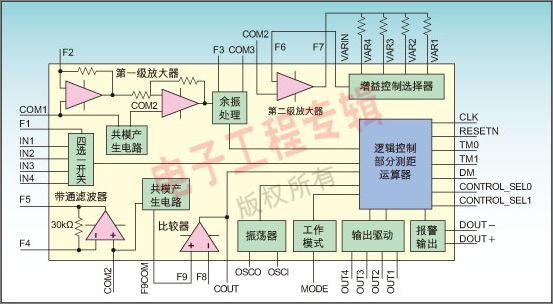
�D1��GM3101��(n��i)����D







